Kinematic model of a hand: each finger has 3 joints with 4 DoF : index
4.8 (238) · $ 39.00 · In stock

Constraint Study for a Hand Exoskeleton: Human Hand Kinematics and Dynamics

Development and Evaluation of a 25-Degree of Freedom Hand Kinematic Model

Massimiliano Solazzi's research works Scuola Superiore Sant'Anna, Pisa (SSSUP) and other places

Wrist and Hand - Physiopedia
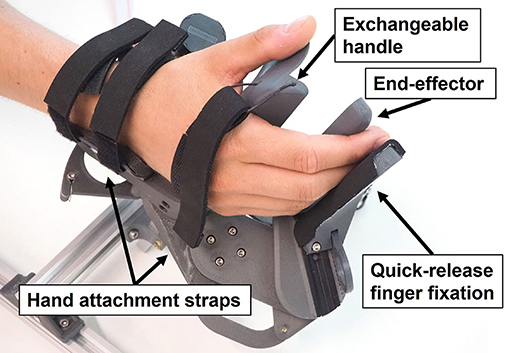
Frontiers A Novel Clinical-Driven Design for Robotic Hand Rehabilitation: Combining Sensory Training, Effortless Setup, and Large Range of Motion in a Palmar Device

Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use
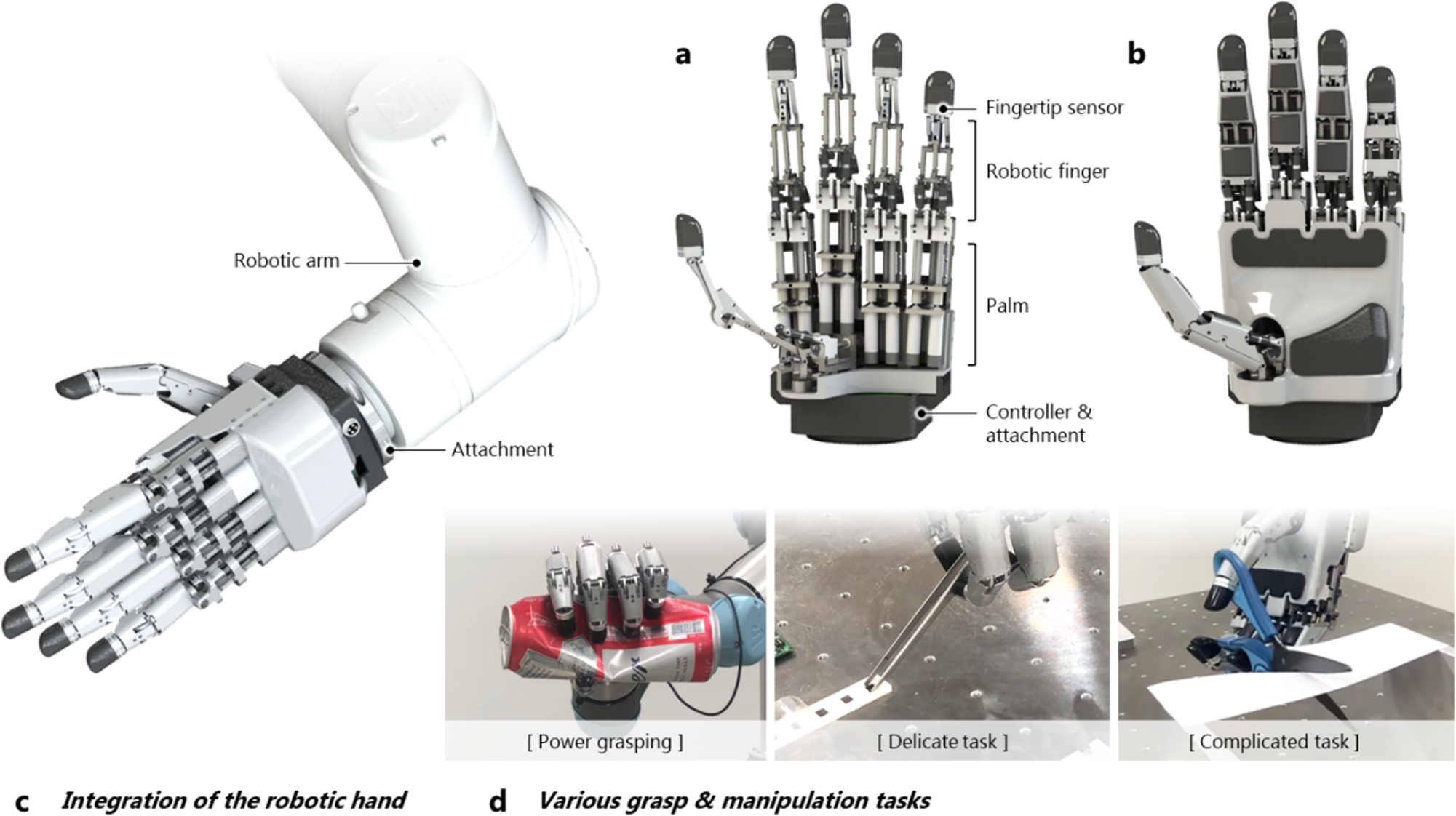
Integrated linkage-driven dexterous anthropomorphic robotic hand

Degrees of freedom of the wrist and fingers' joints.

Your Ring Finger And Index Finger Reveal Whether You Are – Otosection
Solved] 3) Derive Forward and Inverse Kinematic model for the Manipulator

Massimiliano Solazzi's research works Scuola Superiore Sant'Anna, Pisa (SSSUP) and other places

Mine Sarac